Project
EELS Mission Operations System
Description
The software used to drive and monitor NASA JPL’s coolest, most autonomous robot yet.
Client
Year
Published
Services Rendered
UX Design
3D Visualization
Computational Design
Visual Communication
Industries
Aerospace
Robotics

EELS team testing glacial surface mobility using teleoperation features at the Athabasca Glacier, 2024.
Project Overview
The Exobiology Extant Life Surveyor (EELS) platform is a versatile snake-like robot with surface and subsurface mobility capabilities on ice, enabling future exploration of previously inaccessible terrain. The platform has numerous terrestrial and planetary body applications, including the potentially habitable subsurface ocean of Saturn’s moon, Enceladus.
Over the next 3 years, EELS will undergo extensive lab and field testing in terrestrial environments to demonstrate capabilities towards the goal of infusion into a future JPL flight project.
My Role
I designed the UI and UX for mission operations software that integrates functionality from disparate ops software and simplifies multi-step user input.
I improved functionality with novel, complex data visualization for monitoring critical system statuses, preventing crashes, and preventing failures during field tests.

The Challenge
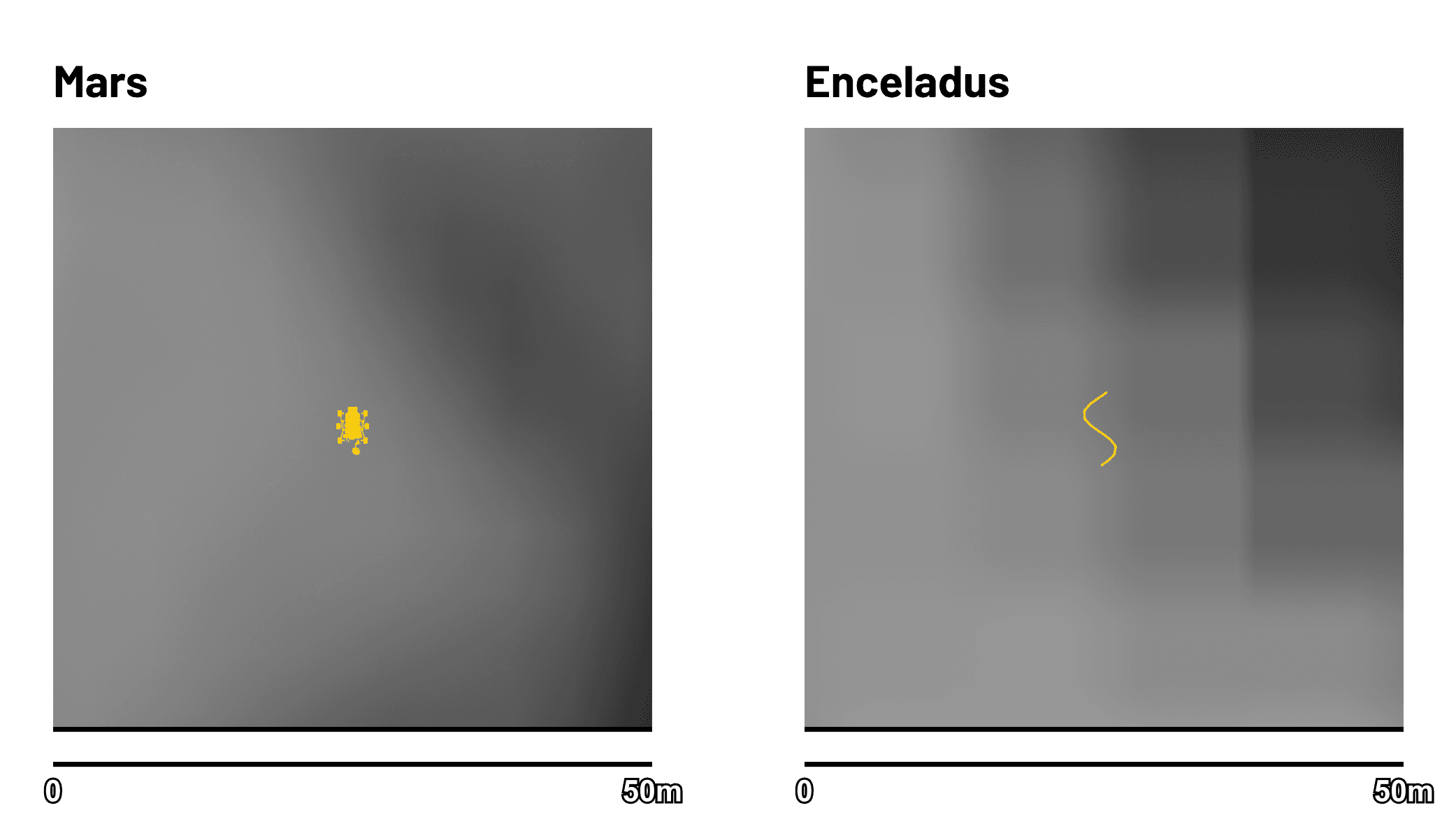
Compared to the Martian surface, where we have fairly high resolution data of the areas NASA wants to explore, we have low resolution data available for the surface of Enceladus. For example, in the highest resolution images of the surface of Enceladus, 1 pixel is equivalent to 12.5km², as shown in the image above.
EELS is designed to compensate for the lack of data by being exceptionally well-prepared with multi-modal perception and mobility, and state-of-the-art autonomy capabilities.
The EELS robot proposes fundamentally different architecture and operating principles to previous flagship spacecraft like the Curiosity and Perseverance rovers. The Mars rovers typically have 6 wheels and traverse horizontally across the Martian surface similar to a car. EELS, on the other hand, has a dynamic, snake-like body with 12 bend joints, 12 twist joints, and 22 screws. This mechanical complexity allows EELS to move with 8 different gaits, enabling mobility across 8 different types of terrain.
The staggering versatility provided by this mechanical complexity likewise requires necessary complexity in the operations software.
Our Solution
The design of the operations software allowed the necessary complexity while keeping the visualization easy to read for operators and, most importantly, easy to identify errors and faults during testing and operation.







The Result




" height="198.09522990933007px" id="hHqXpi9ej" transform="translate(0 0.43)" width="199.99999782364316px"/></svg>)